Media Summary: First Principles of Computer Vision is a lecture series presented by Shree Nayar who is faculty in the Computer Science ... Welcome to 'Modern Computer Vision' course ! This lecture focuses on the practical aspects of obtaining depth information from ... UCF Computer Vision Video Lectures 2012 Instructor: Dr. Mubarak Shah (
Estimating Fundamental Matrix Uncalibrated Stereo - Detailed Analysis & Overview
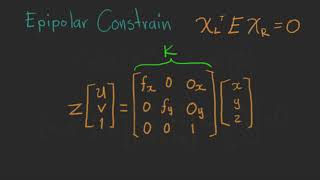
First Principles of Computer Vision is a lecture series presented by Shree Nayar who is faculty in the Computer Science ... Welcome to 'Modern Computer Vision' course ! This lecture focuses on the practical aspects of obtaining depth information from ... UCF Computer Vision Video Lectures 2012 Instructor: Dr. Mubarak Shah ( Machine Vision 6 Stereo cameras : Essential and Fundamental matrix , Epi-polar line Optical flow with matches found using OpenCV's matchTemplate, and inliers to the 8 point algorithm explained in 5 minutes Series: 5 Minutes with Cyrill Cyrill Stachniss, 2021 Further overview videos: