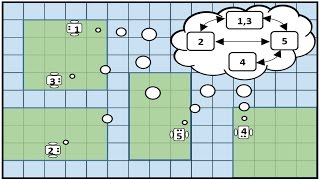
Media Summary: Pham Duy Hung and Trung Dung Ngo www.morelab.org Convex and non-convex structured environments. Pham Duy Hung and Trung Dung Ngo www.morelab.org 14 Pham Duy Hung and Trung Dung Ngo www.morelab.org 12
Distributed Coverage Control Of Networked Multi Robot Systems - Detailed Analysis & Overview
Pham Duy Hung and Trung Dung Ngo www.morelab.org Convex and non-convex structured environments. Pham Duy Hung and Trung Dung Ngo www.morelab.org 14 Pham Duy Hung and Trung Dung Ngo www.morelab.org 12 Pham Duy Hung and Trung Dung Ngo www.morelab.org 10 Series overviews and links can be found on our webpage: Pham Duy Hung and Trung Dung Ngo www.morelab.org 7
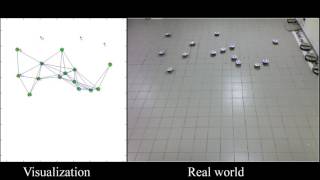
Supplementary video for our IROS 2018 paper. ICRA 2018 Spotlight Video Interactive Session Tue AM Pod V.8 Authors: Viseras, Alberto; Xu, Zhe; Merino, Luis Title: Federico Pratissoli - UNIMORE, University of Modena and Reggio Emilia Talk Topic: Distributed Multi-Robot STE with Coverage Control and Information Theoretic based Coordination Video supplement to our ICRA submission. For questions, please contact awc11.edu. Abstract: This paper presents a ... In a recent T-RO paper, researchers from Université Paris-Saclay and Université de Picardie Jules Verne propose a novel method ...
The paper is available at Abstract: Finding sources of airborne chemicals with mobile ...