Media Summary: In our video a simulation result as well as real-world experiments show the 9-DOF multipurpose Lecture 12 for Optimal Control and Reinforcement Learning 2022 by Prof. Zac Manchester. Topics: - Free and minimum-time ... Lecture 12 for Optimal Control and Reinforcement Learning (CMU 16-745) 2023 by Prof. Zac Manchester. Topics: - Free and ...
Crops Manipulator Generation 1 Trajectory Optimization By A Direct Method - Detailed Analysis & Overview
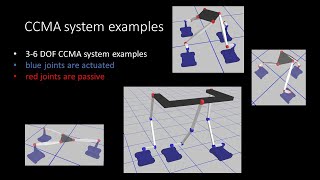
In our video a simulation result as well as real-world experiments show the 9-DOF multipurpose Lecture 12 for Optimal Control and Reinforcement Learning 2022 by Prof. Zac Manchester. Topics: - Free and minimum-time ... Lecture 12 for Optimal Control and Reinforcement Learning (CMU 16-745) 2023 by Prof. Zac Manchester. Topics: - Free and ... This video shows visualizations in MATLAB and simulations in MuJoCo of We present a novel class of robots belonging to Constrained Collaborative Mobile Agents (CCMA) family which consists of ground ... video attachment for the paper: [Joshua Fishman and Luca Carlone, "Control and
Paper: Code and more: Abstract - Robots must make and break contact to ... This video shows motions planned through contact-implicit This video showcases the work presented in the 2023 ICRA paper, " ICRA 2014 Predicting Initialization Effectiveness for