Media Summary: ECCV 2018 This work proposes a general-purpose, fully- Authors: Qingyong Hu, Bo Yang, Linhai Xie, Stefano Rosa, Yulan Guo, Zhihua Wang, Niki Trigoni, Andrew Markham Description: ... Authors: Jiacheng Wei, Guosheng Lin, Kim-Hui Yap, Tzu-Yi Hung, Lihua Xie Description:
Continuous Mapping Convolution For Large Scale Point Clouds Semantic Segmentation - Detailed Analysis & Overview
ECCV 2018 This work proposes a general-purpose, fully- Authors: Qingyong Hu, Bo Yang, Linhai Xie, Stefano Rosa, Yulan Guo, Zhihua Wang, Niki Trigoni, Andrew Markham Description: ... Authors: Jiacheng Wei, Guosheng Lin, Kim-Hui Yap, Tzu-Yi Hung, Lihua Xie Description: Yi Li; Haozhi Qi; Jifeng Dai; Xiangyang Ji; Yichen Wei We present the first fully A Cylindrical Convolution Network for Dense Top-View Semantic Segmentation with LiDAR Point Clouds Authors: Jiazhao Zhang, Chenyang Zhu, Lintao Zheng, Kai Xu Description: Online
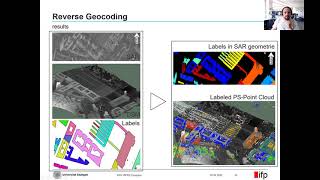
Authors: Hanyu Shi, Guosheng Lin, Hao Wang, Tzu-Yi Hung, Zhenhua Wang Description: Excited to share our new work and new dataset on LiDAR 2nd Workshop 3D-Deep Learning for Autonomous Driving, IV 2020 Las Vegas ... Title: Efficient Vertical Object Detection in Multi-scale Graph Networks for 3D Point Cloud Segmentation (Chao Luo's PhD Thesis) Integrating differential synthetic aperture radar measurements into building information modeling systems requires a
ICRA 2020 Project Page: ArXiv Paper: Dilated






![Annotation rules and classes for semantic segmentation of point clouds for digitalization of [....]](https://i.ytimg.com/vi/LIvs74_5ZBs/mqdefault.jpg)