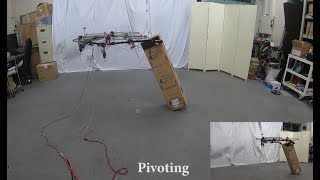
Media Summary: JSK Lab, the University of Tokyo Author: Fan Shi, Moju Zhao, Masaki Murooka, Kei Okada, Masayuki Inaba Abstract: Regrasping ... Video and methodology corresponding to the paper " Aerial Manipulation Robot in Contact with 15 kV Power Line
Agile Manipulation Task For Aerial Transformable Multilink Robot - Detailed Analysis & Overview
JSK Lab, the University of Tokyo Author: Fan Shi, Moju Zhao, Masaki Murooka, Kei Okada, Masayuki Inaba Abstract: Regrasping ... Video and methodology corresponding to the paper " Aerial Manipulation Robot in Contact with 15 kV Power Line Paper: Yüksel B, Mahboubi S, Secchi C, Bülthoff HH, Franchi A. Design, Identification and Experimental Testing of a Light-Weight ... Paper: Staub N, Mohammadi M, Bicego D, Prattichizzo D, Franchi A. Towards Subscribe to Inverse! Taking cues from one of the most
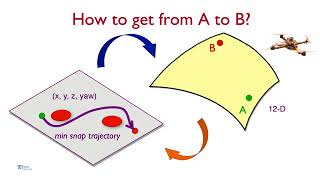
Our Chief Technology Officer, Pras Velagapudi, explains what happens when we use natural language voice commands and ... Autonomous Agile Aerial Robots Vijay Kumar Authors: Josep Martí-Saumell, Hugo Duarte, Patrick Grosch, Juan Andrade-Cetto, Angel Santamaria-Navarro, Joan Solà ... Dual Arm Aerial Manipulation Robot for Installation of Helical Bird Diverter We are proud to introduce our first humanoid