Media Summary: This video delves into the critical considerations for designing workspaces where This video presents the technologies used within SHERLOCK to generate An uninstrumented touchpad mounted on the
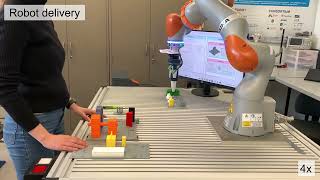
A Practical And Effective Layout For A Safe Human Robot Collaborative Assembly Task - Detailed Analysis & Overview
This video delves into the critical considerations for designing workspaces where This video presents the technologies used within SHERLOCK to generate An uninstrumented touchpad mounted on the Martijn Cramer*, Karel Kellens, Eric Demeester - Probabilistic decision model for adaptive Delve into the critical methods and considerations behind creating This video was presented at the 2024 ACM/IEEE International Conference on
GoferBot: A Visual Guided Human-Robot Collaborative Assembly System The winner of this year's Automation Student Award is Marco Seibert, who has explored how ... a multiple Kinects based exteroceptive sensing framework to achieve