Media Summary: This thesis focuses on the development of an integrated task and This project discusses a real-time implementation of a hierarchical model predictive control (MPC) This is my talk for the fully virtual 2021 ACC in New Orleans, LA. Always have a backup in case of technical difficulties! You can ...
A Motion Planning And Velocity Collision Avoidance Framework - Detailed Analysis & Overview
This thesis focuses on the development of an integrated task and This project discusses a real-time implementation of a hierarchical model predictive control (MPC) This is my talk for the fully virtual 2021 ACC in New Orleans, LA. Always have a backup in case of technical difficulties! You can ... The University of Texas at Austin demonstrates how autonomous inspection drones can self-localize, path plan, perform a mission ... MPC with Velocity Obstacle for Dynamic Obstacles ... different scenarios by changing the obstacles pose and
More information available at: www.ros.org/wiki/multi_robot_collision_avoidance. Collision avoidance with moving obstacles using time-varying constraints Collision Avoidance based on Model Predictive Control and Velocity Obstacle Potential Field Collision Avoidance based on Velocity Obstacle Collision avoidance using time-varying constraints - nonlinear dynamics of agent This work contributes a novel strategy towards risk-aware
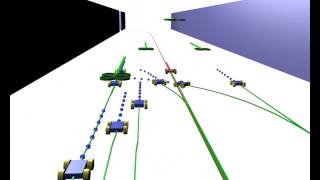
Through the circle but all of the vectors that are in the white zone they are valid Which can be robots are circular with a known current The video shows ability of the RHC-based formation control to avoid