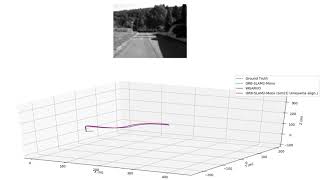
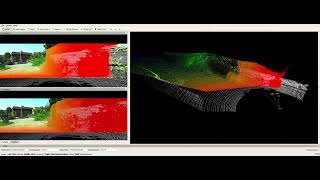
Media Summary: Final lidar point cloud generated with SLAMLab (multi-sensor SLAM). Fly-through along the sensor trajectory. Data from the WGANVO: Monocular Visual Odometry based on Generative Adversarial Networks Paper: ... This video demonstrates the result of FSNet on the full validation
Kitti Mapping Sequence 03 Ama - Detailed Analysis & Overview
Final lidar point cloud generated with SLAMLab (multi-sensor SLAM). Fly-through along the sensor trajectory. Data from the WGANVO: Monocular Visual Odometry based on Generative Adversarial Networks Paper: ... This video demonstrates the result of FSNet on the full validation S-PTAM is a Stereo SLAM system able to compute the camera trajectory in real-time. It heavily exploits the parallel nature of the ... This is a demonstration of the M.A.Sc. Thesis Project: Sparse Stereo Visual Odometry with Local Non-Linear Least-Squares ... The video shows the camera pose estimation for the
Visualization on KITTI tracking benchmark Running a preliminary visual odometry implementation on the Analyzing the SemanticKITTI dataset with Open3D-ML left: semantic labels right: instance labels (only for the movable objects) code: The video shows the predictions of 3D-MiniNet (3D-MiniNet: Learning a 2D Representation from Point Clouds for Fast and ... Viewing the SemanticKITTI dataset with Open3D-ML
In this video, Marcus McPeek, Arista Senior Technical Lead, explores the seamless integration between Arista's Architect, Validate ... Don't miss out! Join us at our next KubeCon + CloudNativeCon events in Mumbai, India (18-19 June, 2026), Yokohama, Japan ...