Media Summary: Is another you know major motivation for for uh let's say a simpler optimization of In Part 12 of Q-Learning to World Models, we're going to build out the imagine Lecture 18: Stochastic Gradient Descent 2 Instructor: John W. Roberts See the complete course at:
6 832 Final Project Trajectory Optimization For A 2d Hopper - Detailed Analysis & Overview
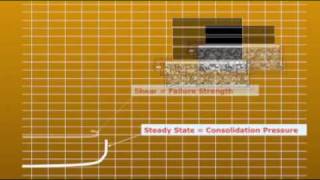
Is another you know major motivation for for uh let's say a simpler optimization of In Part 12 of Q-Learning to World Models, we're going to build out the imagine Lecture 18: Stochastic Gradient Descent 2 Instructor: John W. Roberts See the complete course at: Interested in learning more? I highly recommend the textbook "Material Science and Engineering" by Callister and Rethwisch ... Okay and you can imagine now that writing a optimization problem if i wanted to do In Lecture 8, Design Example, Joe Marinelli of Solids Handling Technologies takes you through a typical design example.
You can download my spreadsheets that analyze shear cell and permeability test results to design or select bins and See the other videos in this series: This video ... Speaker, institute & title 1) Hojin Kim, Purdue University, Probabilistic Forecasting and Data Assimilation of Turbulent Flows with ...