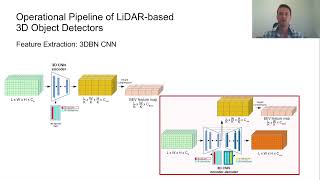
Media Summary: Inside my school and program, I teach you my system to become an AI engineer or freelancer. Life-time access, personal help by ... Lecture: Self-Driving Cars (Prof. Andreas Geiger, University of Tübingen) Course Website with Slides, Lecture Notes, Problems ... The point cloud data is first projected on bird's eye view format and applied the
3d Object Detection - Detailed Analysis & Overview
Inside my school and program, I teach you my system to become an AI engineer or freelancer. Life-time access, personal help by ... Lecture: Self-Driving Cars (Prof. Andreas Geiger, University of Tübingen) Course Website with Slides, Lecture Notes, Problems ... The point cloud data is first projected on bird's eye view format and applied the Hello everyone it is my pleasure to introduce our work cross-modality Full title: A comprehensive survey of LIDAR-based Get FREE Robotics & AI Resources (Guide, Textbooks, Courses, Resume Template, Code & Discounts) – Sign up via the pop-up ...
Learn more about how it works in this video by PyTorch3D co-creator and software engineer Nikhila Ravi: ... 2011 09 26 drive 0014 sync both 2 sides Code: Hi i'm ozan ninal and i'll be presenting our work improving point cloud semantic segmentation by learning